第十三届先进控制理论与应用“至善前沿论坛”在东南大学四牌楼校区成功举行
2023年5月7日,第十三届先进控制理论与应用“至善前沿论坛”在东南大学四牌楼校区礼东楼春晖堂成功举行。本次论坛由IEEE工业电子学会南京分会、jinnianhui金年会、“复杂工程系统测量与控制”教育部重点实验室以及江苏省自动化学会联合主办。本次论坛旨在关注先进控制理论与应用的最新研究成果,促进专家学者之间的合作与交流,并传承东南大学“止于至善”的校训精神。
论坛共邀请了11位专家学者作学术报告,包括同济大学洪奕光教授、中国科学院数学与系统科学研究院郭宝珠教授、上海交通大学张卫东教授、华南理工大学裴海龙教授、东北大学郭戈教授、浙江工业大学张文安教授、华东理工大学唐漾教授、上海交通大学朱善迎教授、南开大学孙宁教授、清华大学徐静副教授和江南大学樊启高教授。本次论坛的报告主题涵盖了非线性控制理论与方法、复杂系统的分析与综合、分布式优化理论方法与应用、无人机设计与控制、机器人驱动与控制、智能无人系统感知与决策等研究方向。jinnianhui金年会李世华教授、陈从颜教授、翟军勇教授、张亚教授、陈杨杨教授、苏金亚教授、王翔宇副教授、王永健副研究员,同济大学梁舒研究员、董怡研究员分别主持了报告。论坛上,各位专家作了精彩报告并与在场的老师及同学们展开了深入交流。论坛规模约50余人。

“至善前沿论坛”会场
在上午的开幕式上,IEEE工业电子学会南京分会主席、jinnianhui金年会副院长、江苏省自动化学会理事长李世华教授致开幕辞,对出席论坛的各位专家学者表示了衷心的感谢,并对参加论坛的老师和同学表示了欢迎。
 李世华教授致辞
李世华教授致辞
在上午的第一场报告中,同济大学洪奕光教授作了题为“复杂系统的分析与综合漫谈”的报告。报告内容涵盖了复杂系统在演化、学习、决策和控制方面的一些重要进展。洪教授详细介绍了社会网络的涌现行为和干预、基于流形的学习、分布式优化和博弈,以及多智能体控制等领域的多方面成果。这些内容引起了与会专家学者的浓厚兴趣,为会议注入了活力。

洪奕光教授作报告
在上午的第二场报告中,上海交通大学张卫东教授作了题为“无人机控制:从单机到集群协同”的报告。报告首先围绕无人机的单机控制,介绍了该领域的研究思路,并展示了团队在无人机本体和组件开发、抗干扰控制、避障穿越树林、吊载减摇控制等方面的研究成果;其次,在集群协同部分,分析了集群编队控制所面临的挑战,介绍了研究思路,并展示了在集群编队、队形变换和协同吊载等方面的实验结果;最后,张教授介绍了空海跨域协同的关键技术,并展示了团队在相关工程开发和技术验证方面所取得的成果。
 张卫东教授作报告
张卫东教授作报告
在上午的第三场报告中,华南理工大学裴海龙教授作了题为“新构型涵道风扇无人机系统”的报告。涵道风扇动力系统具有独特的构型,近年来随着人们对其气动特性的进一步认识以及新型控制算法的发展,其飞行器设计部分再次得到广泛关注。报告首先介绍了涵道风扇构型的气动特性和控制特点的研究进展,然后探讨了基于涵道风扇的几种新构型无人机设计、航迹规划和飞行控制,最后介绍了正在进行的VTOL涵道风扇飞行器设计应用。
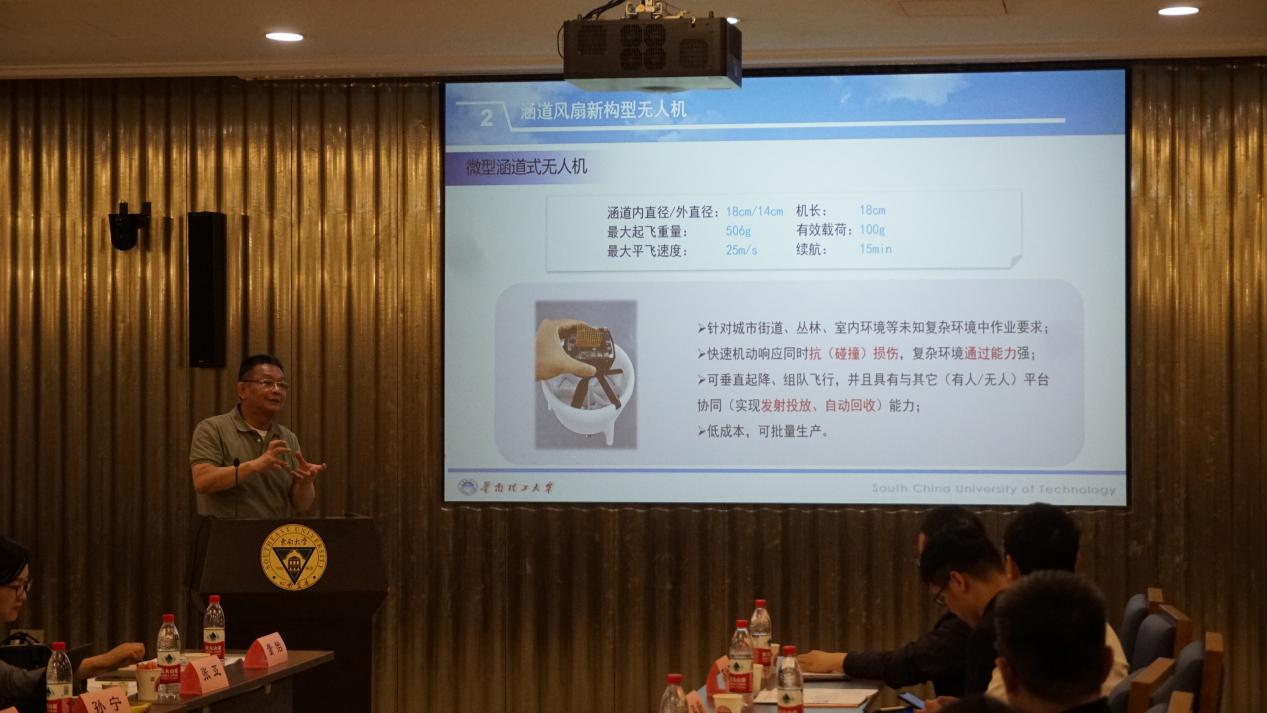 裴海龙教授作报告
裴海龙教授作报告
在上午的第四场报告中,上海交通大学朱善迎教授作了题为“Noise-robust Distributed Algorithms for Constrained Optimization Problems”的报告。报告介绍了一种噪声鲁棒的分布式梯度跟踪算法,用于解决约束优化问题,并提出了一种噪声跟踪方案。研究结果表明,所提方法可减弱噪声对算法性能的影响。并且随着步长的递减,算法在强凸代价最优解上的收敛性能够进一步提高、收敛更加精确。
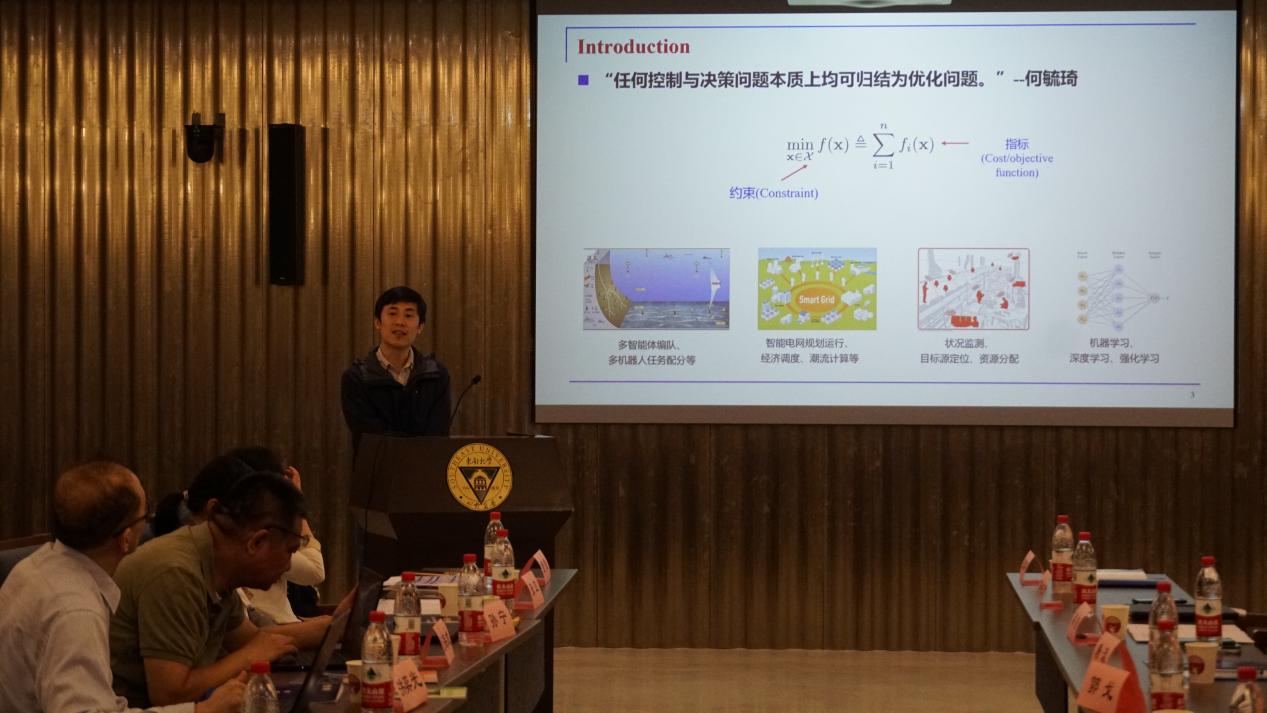 朱善迎教授作报告
朱善迎教授作报告
在上午的第五场报告中,南开大学孙宁教授作了题为“仿生气动机器人智能控制及应用”的报告。报告围绕气动仿生机器人的建模、规划和控制等方面展开:首先,针对单一气动仿生机器人的多个复杂控制问题,提出了多种性能优越的智能控制方法;其次,对于多气动仿生机器人,提出了准确的动力学建模方法以及多种高性能控制方法;最后,展望了气动仿生机器人未来的研究方向和发展趋势。

孙宁教授作报告
在下午的第一场报告中,东北大学郭戈教授围绕“汽车共享出行系统的再平衡调度”主题进行了报告。报告首先介绍了包含内外因素的交通预测模型,提出了长短期交通流和出行需求预测的方法;其次,结合交通流和出行需求预测模型,探讨了共享出行系统的车辆动态再平衡调度问题;最后,针对电动汽车充电调度与系统再平衡的复合问题,提出了电车充电-系统平衡复合调度、车队规模优化和充电站规模优化的系列方法。
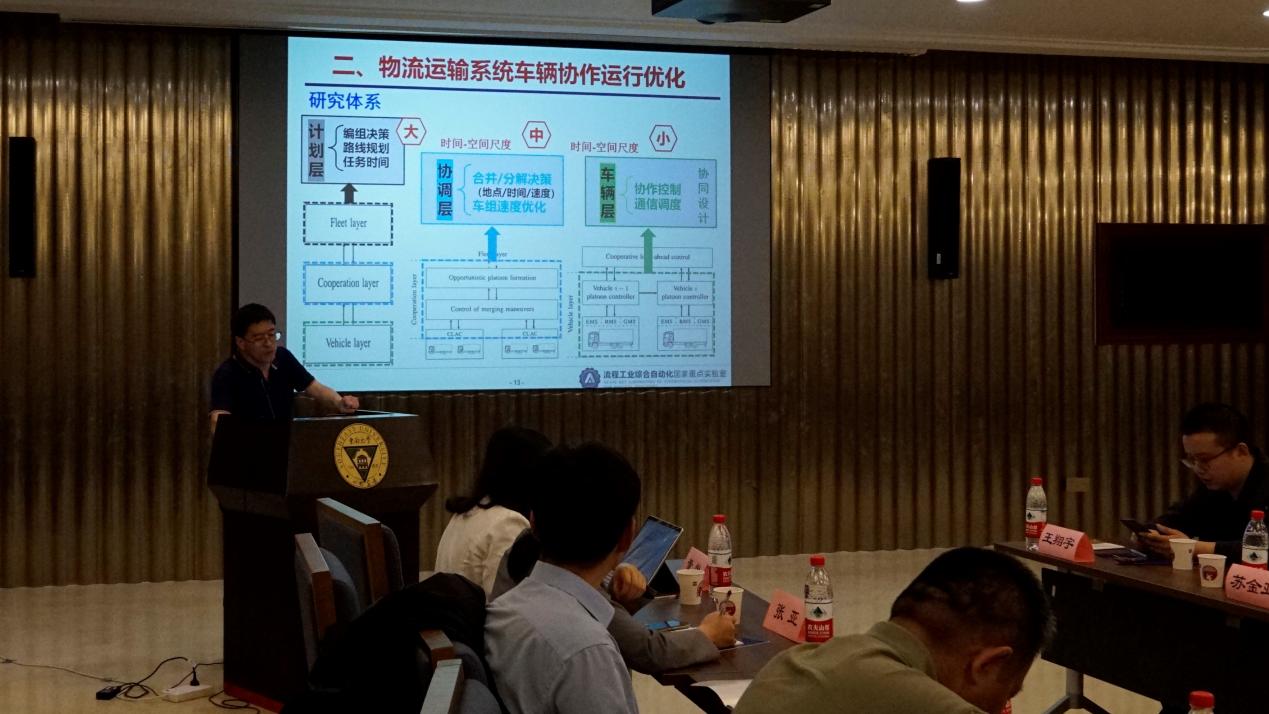 郭戈教授作报告
郭戈教授作报告
在下午的第二场报告中,江南大学樊启高教授作了题为“面向精准医疗的磁驱微机器人运动调控理论与方法研究”的报告,详细介绍了所在团队的研究成果:建立起高精度动态磁场生成系统,可实现微机器人的高效轨迹规划和精确运动调控;从生物医学应用角度进行微机器人个体及集群运动调控系统设计与研究;综合运用线性驱动、深度学习、地图构建和多闭环耦合控制等技术,进行系统软件和算法设计,并对微机器人个体和集群的形态、运动调控系统的特性进行分析与原理性验证。
 樊启高教授作报告
樊启高教授作报告
在下午的第三场报告中,清华大学徐静副教授就“智能飞行器及航空航天制造业的应用”进行了报告。首先,提出了基于优化与学习的三维测量方法,实现了在强扰动工况下的鲁棒测量;其次,解决了移动式机器人在位置和姿态精准控制方面的挑战,提出了基于仿真现实迁移的定位方法和条纹投影的视觉伺服控制方法,实现了在大尺度空间中的精确定位;最后,针对非完整信息空间中多参数调控的难题,提出了模型映射和技能学习相结合的方法,实现了在欠观测条件下的自主决策。
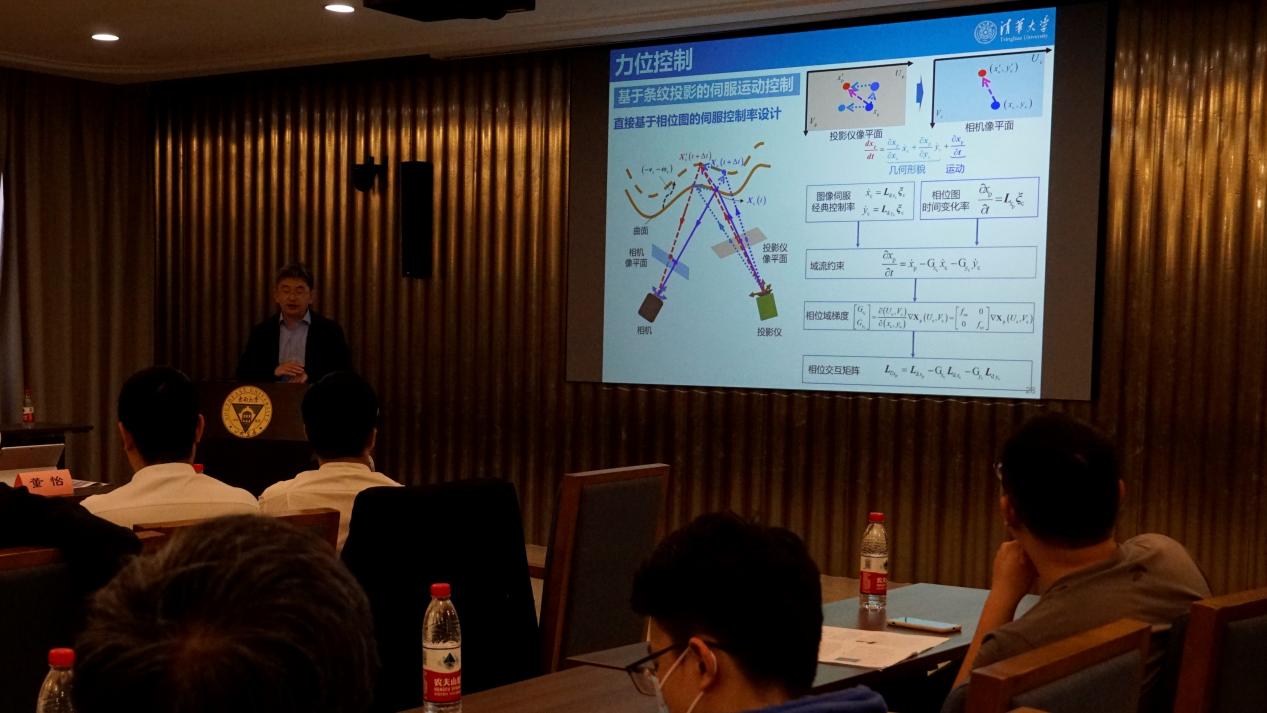 徐静副教授作报告
徐静副教授作报告
在下午的第四场报告中,中国科学院数学与系统科学研究院郭宝珠教授作了题为“高维热方程边界控制的鲁棒输出调节”的报告。报告介绍了团队近年来所提出的基于观测器的控制方法,成功地解决了一系列一维偏微分系统的输出调节问题,并讨论了针对高维偏微分方程的应用问题。这些内容增进了与会专家学者对偏微分系统输出调节的认知以及对观测器本质的理解,引发了在场热烈的讨论。

郭宝珠教授作报告
在下午的第五场报告中,浙江工业大学张文安教授就“复杂测量下的多源信息融合估计”进行了报告。报告首先介绍了感知信息从单一数据需求向多源超高清、超高速数据和跨网络深度融合需求的转变趋势。其次阐述了由于感知信息高维和不确定性,经典信息融合理论中的信息同步和完备性要求难以满足而产生的关键难点,并对此提出了有效的处理方法。
 张文安教授作报告
张文安教授作报告
在下午的第六场报告中,华东理工大学唐漾教授围绕“智能无人系统感知与决策”主题进行了报告。报告聚焦于复杂未知场景下的泛化控制、资源受限场景下的最优决策和开放动态场景下的协同控制等关键问题,详细介绍了团队在感知任务精准性和迁移性、决策任务的实时性和最优性以及控制任务的协同性和自主性等方面的相关工作,总结并展望了智能无人系统感知、决策与控制的未来研究方向。

唐漾教授作报告
本次论坛的十一场精彩报告,推动了与会人员之间的学术交流,并引发了热烈讨论。论坛最后,jinnianhui金年会张亚副院长进行了总结发言,再次对各位专家学者和参会人员表示了衷心的感谢。在热烈的掌声中,本次论坛圆满闭幕。此次论坛聚焦于先进控制理论与应用的前沿成果,报告内容理论与实际相结合,体现了对学术追求“止于至善”的精神。

会议合影

